Underwater Imaging
Knowledge acquired through many years of ROV development has pushed in-house camera manufacturing, all designed to enhance video streaming capabilities.

Mini Cam
Auxiliary IP camera for ROV rear-facing or tooling applications. Coming with advanced web streaming settings and visibility enhancement.

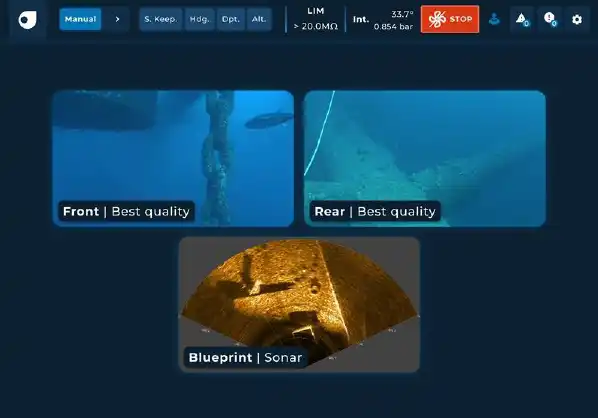
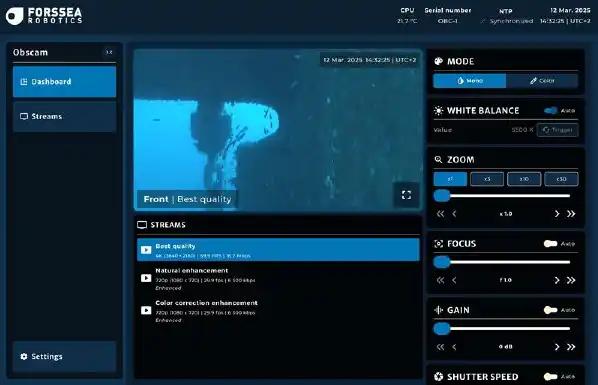
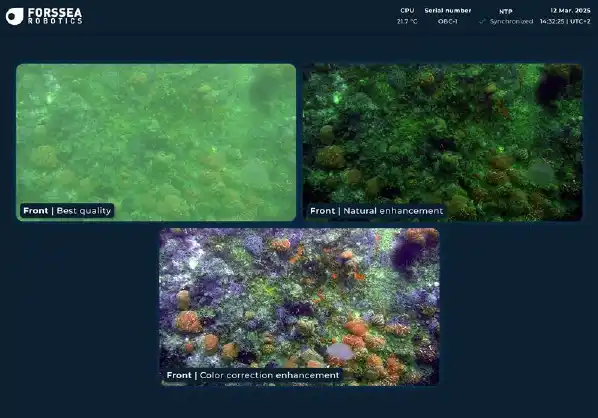
Obs Cam
4K-IP ROV inspection and navigation camera, suited for low light applications. Coming with advanced web streaming settings, visibility enhancement and 30x optical zoom.

SMOOVE®
Resident Camera System (2,000 or 6,000m versions) for real-time underwater vision and scientific observatories deployment.